

Hybrid electro-pneumatic service robot morphology 'Aerobot'
The research challenge that motivated the development of Aerobot was to show that a wheeled anthropomorphic robot morphology could perform locomotive tasks that normally only legged systems could perform (i.e. stair climbing, gap/crevice crossing and step traversal).
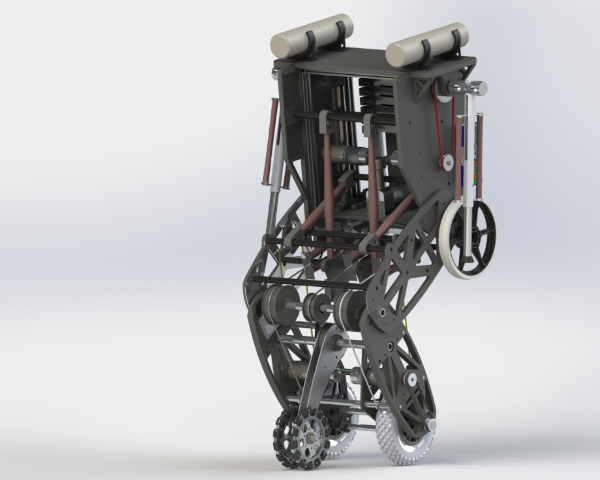
Aerobot Render
The kinematics of Aerobot are similar to humans; it has seven limbs including a shank, stabilizing linkage, thigh, torso, social interface and two arms. There is a differential drive configuration at the base of the shank and a passive omni-directional wheel assembly at the end of the stabilizer linkage. The arms possess linear joints at the elbow. A linearly actuated linkage containing a pair of independently controlled wheels is located at the hip. This linkage is termed the Lower Hip Mechanism (LHM). In total, there a four separate locomotive configurations that can be adopted.
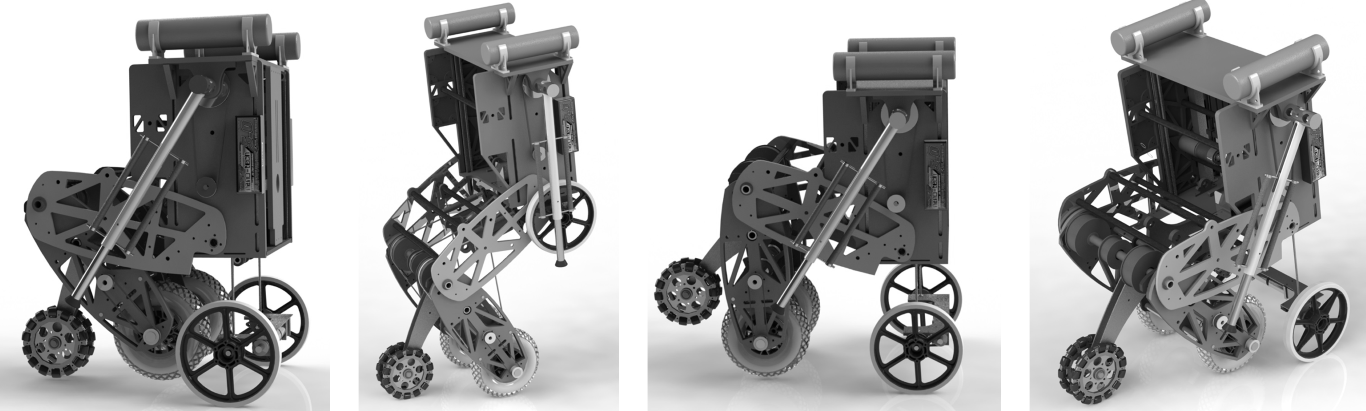
The proposed morphology has incorporated an efficient, statically stable and low control-cost method of traversing obstacles and climbing stairs (ascent and descent). Aerobot was designed to be capable of traversing kerbs and crossing crevices/gaps. In both cases, performing these actions requires coordination of the stabilizer, knee, hip, shoulder, elbow and LHM.
The design of Aerobot was validated through realisation of both physical and functional design targets. It demonstrated the ability to traverse steps and cross gaps in both lab and dynamic real-world testing environments. It was not possible to achieve coordinated, unassisted stair climbing on the physical robot system however the kinematic ability of the system to perform stairclimbing was validated in a 3D dynamic simulation environment. A patent application has been filed which captures the underlying principles of this design.