Cooperative automated driving
Automated vehicles are expected to become mainstream within 5 years. Once there are several such vehicles on the road, they will be able to cooperate using vehicle-to-vehicle communication to share information and coordinate their actions in a decentralized way.
However, protocols for coordinating driving actions face a number of challenges:
- Driving requires real-time and safe control software
- The network is not sufficiently reliable
- Sensors are not sufficiently accurate
- Other vehicles may not be available for communcation
Vehicle-to-vehicle communication cannot be relied upon for implementing safe coordination protocols.
We have considered for the design of a solution to the problem Vertigo, a Group Communication System providing geocast with reliable success confirmation
Reliable communication is not necessary for safe protocols, as long as control software can adapt in case communication is not successful, and success can be reliably detected.
To confirm success reliably, the absence of non-communicating vehicles must be confirmed. Vertigo achieves this by combining LIDAR data from multiple vehicles as follows.
![]()
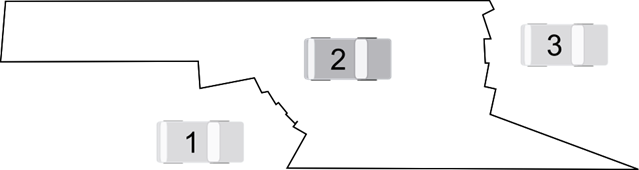
2. Obtain similar view from other vehicles, correct for time differences using maximum velocity:
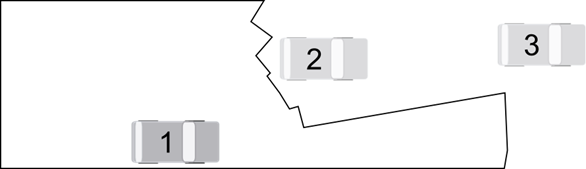
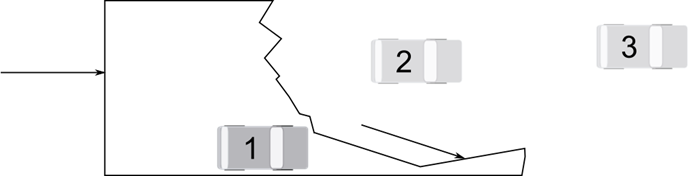
3. Merge views from vehicle 1 and 2 together:
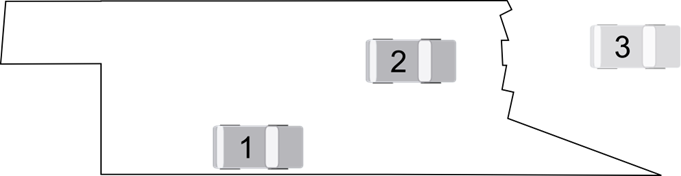
4. I know that vehicles 1 and 2 are the only vehicles in this area
The set of vehicles is a membership view for the covered area at a given time. If all members respond to a geocast to the area, success is reliably confirmed.
Round-a-sim
A novel simulator for evaluating control software for cooperative automated vehicles. Cars drive along pre-defined tracks for efficient simulation and simpler algorithms. Acceleration, LIDAR (with buildings), GPS, and VANET are simulated and interfaces are provided to control software. A graphical tool is used to define scenarios.
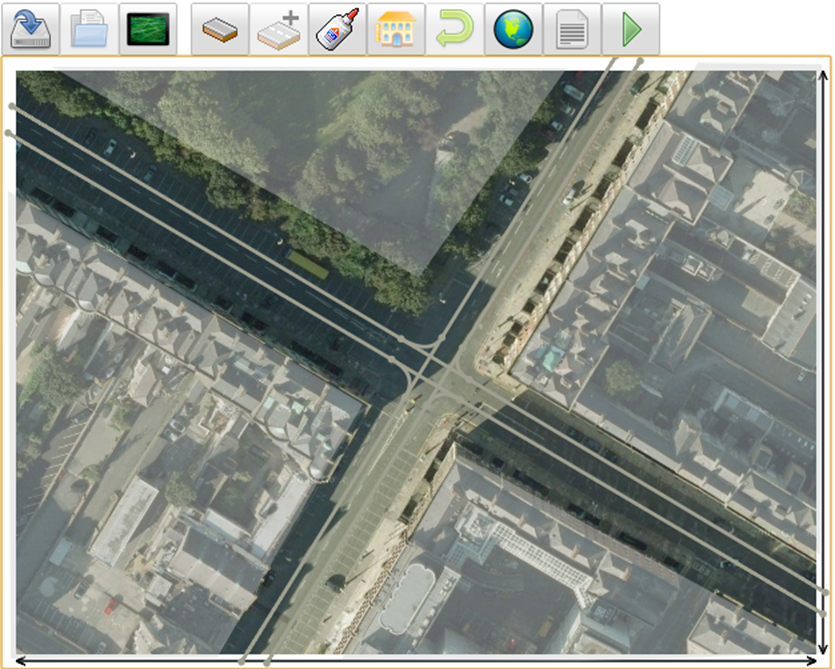
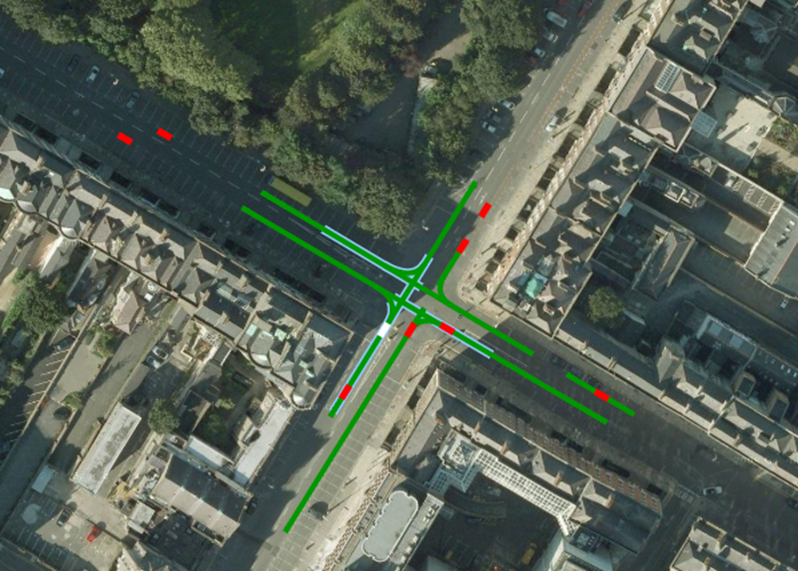
Scenario: Merrion Square
Round-a-sim is used to evaluate control software that uses Vertigo in a coordination protocol for managing an intersection in a decentralized way. A comparison is made to traffic lights that alternate between North-South and East-West directions.
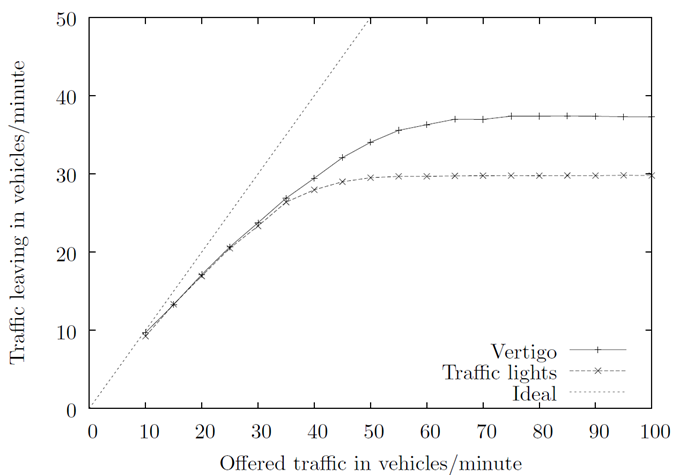
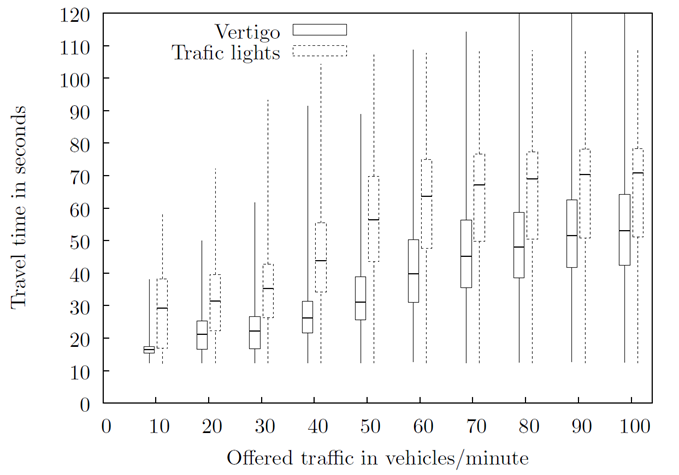
Results
Traffic flow increased by 25% Travel time reduced by up to 40%
People
Marco Slot, Mélanie Bouroche, Siobhán Clarke, Vinny Cahill
Sponsors
![]()