

Autonomous patient transport system for hospitals (2011-2012)
One of the groups earliest projects concerned the development of a semi-autonomous wheelchair for use in hospitals. It was envisioned that the system could safely transport patients between locations in a building without the patient requiring human accompaniment. This alleviates the requirement for healthcare professionals or other hospital staff to personally escort patients to and from appointments in different locations throughout the hospital.
The basic concept behind the design was that when a patient required transportation within the hospital, they were presented with a wheelchair capable of autonomous guidance. A nurse or member of hospital staff would then set the required destination. The patient could then choose to (a) navigate to the destination manually using a GPS-style map as guidance (b) choose for the wheelchair to drive autonomously. The patient could switch between these two modes as frequently as they liked. Sensors in this hospital track the location of these wheelchairs and should a wheelchair deviate significantly from the recommended route, an alarm is instantly raised.
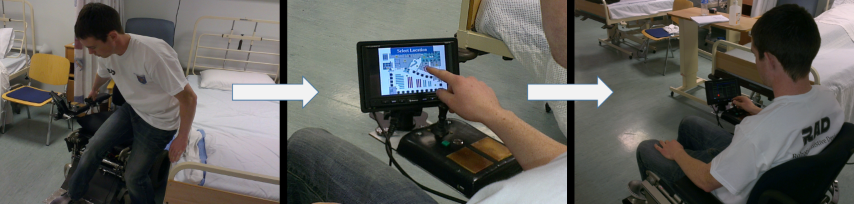
An electric wheelchair was modified to be controllable by an on-board computer, which in turn was connected to a range of sensors including a depth sensor. A custom joystick was developed that enabled passengers to switch instantaneously between states of manual and autonomous control. The prototype was tested and validated in St. James hospital in Dublin.
This research has so far resulted in the publishing of one patent (granted in the USA). This work also contributed towards winning two early-stage start-up competitions in Dublin in 2012. This concept was further developed when I earned the opportunity to compete at the Global Idea to Product (I2P) event which took place in Stockholm in November 2012. The I2P Global event is a major event targeted at early-stage start-ups engaged in disruptive research. This work has further inspired the development of further research and the development of several generations of semi-autonomous controllers for applications involving service robots.
