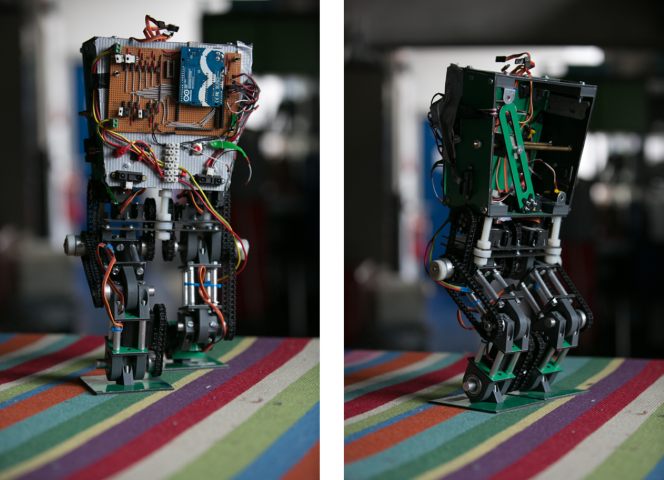
Design of bipedal walking robot (2013)
Humanoid robots are often considered the most desirable platform with which to integrate robots into a human centered environment. A morphology which mimics that of a human must, by its nature be well suited to operate in areas designed for humans. The comparative mechanical complexity of such robots does however limit the functionality which can be achieved. The purpose of this project was to re-examine the mechanical design of such systems in an effort to reduce the complexity of control tasks such as walking. This was achieved by introducing an element of static stability (remaining upright in the absence of a restoring force from the motors) which is not generally present in robots of this type.