

Robbie the Robot
4 June 2014
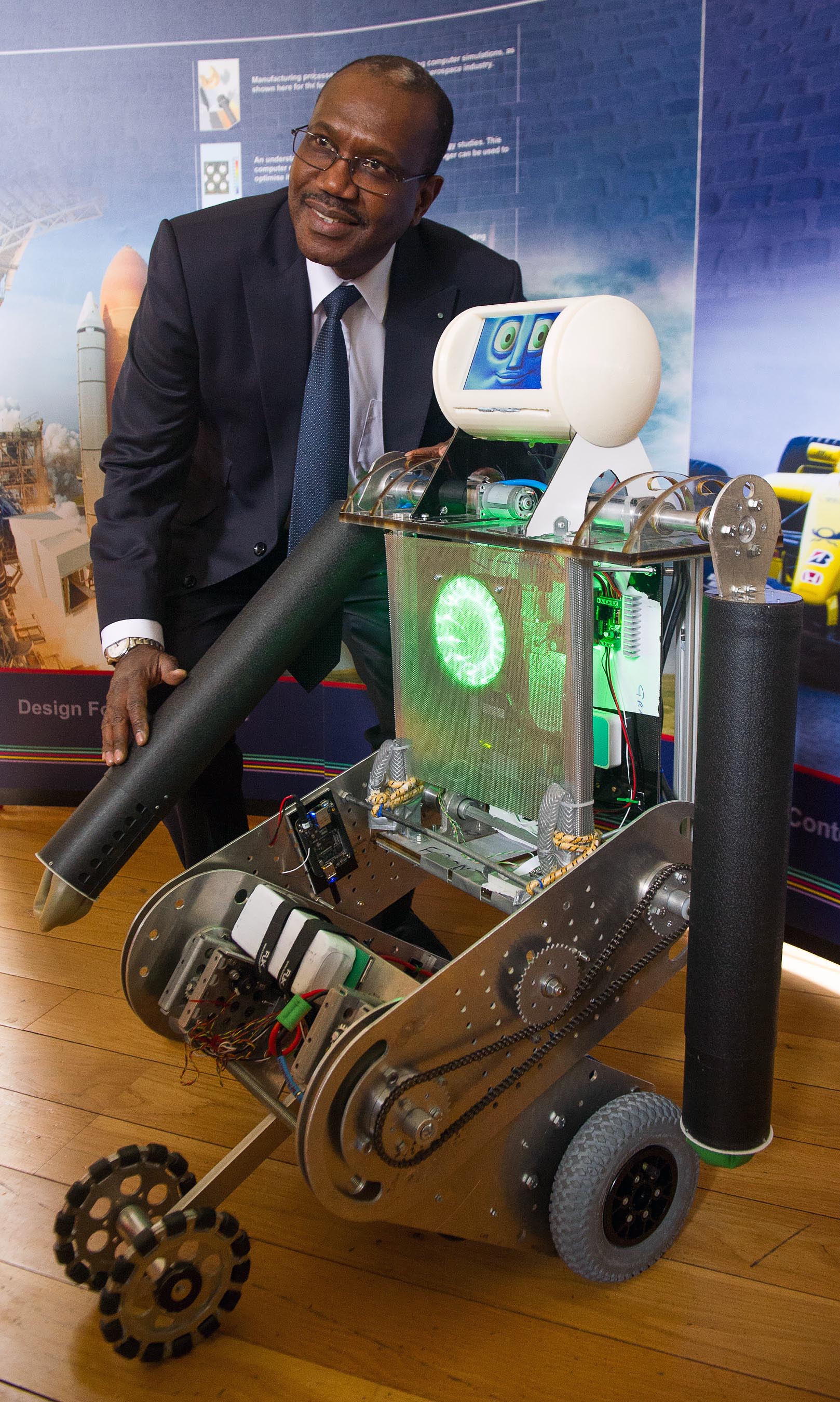
Designing and building a robot from scratch in 4 months might sound like a highly ambitious (or even madly unrealistic!) challenge, but that is exactly the challenge that Prof. Kevin Kelly and a team of undergraduate and post-graduate engineers accepted and overcame. The challenge was issued by Cork teenager Joanne O'Riordan in a famous speech at a United Nations conference in New York in April 2012. Joanne was born with a very rare condition called Total Amelia - meaning she was born with no arms or legs. As anyone who know her will testify though, Joanne is steadfastly unwilling to let this inhibit or limit her life in any way - her infectious can-do spirit and willingness to embrace technology has seen her overcome many obstacles. However, many 'simple' everyday tasks that most of us take for granted present significant challenges for her - prompting her to wish for a robot that could 'pick up things I drop like my pen, knife, fork...' Explaining how Trinity College got involved, Prof. Kelly said "The research in autonomous robots and gripping technology that we were engaged in at Trinity seemed an ideal match for what Joanne was asking for. I got in touch with Joanne and her family and we began discussing how we could help." Following discussions with the family, a donation of Euro50,000 was given by the International Telecommunication Union (ITU), the United Nations specialised agency for information and communication technologies. This donation was to fund the design and construction of a prototype robot to be ready in time for the premiere of the documentary of Joanne's life ('No Limbs, No Limits') on October 6th 2013. Work began in earnest in May 2013 with up to 10 people working on the project at various times. "On the face of it, building a robot to pick up dropped items sounds like a straight forward idea - we take it for granted that we can easily do this ourselves. However, there are huge challenges when trying to this with a robot in a domestic environment. Primate evolution spanning 65 million years has got us where we are now whereas we had 3 months to build something!" said Conor McGinn, Chief Engineer and design lead with the Trinity project research team, who is also completing his PhD. The robot's head is made from 3D printed plastic, with an enclosed 8-inch LCD screen (the face). The body consists of aluminium, carbon fibre and plastic, while 'inside' are lithium-polymer batteries, computers, motors, gearboxes, sensors and communication hardware that act as the 'brain', 'muscles' and 'nervous system' of the robot.
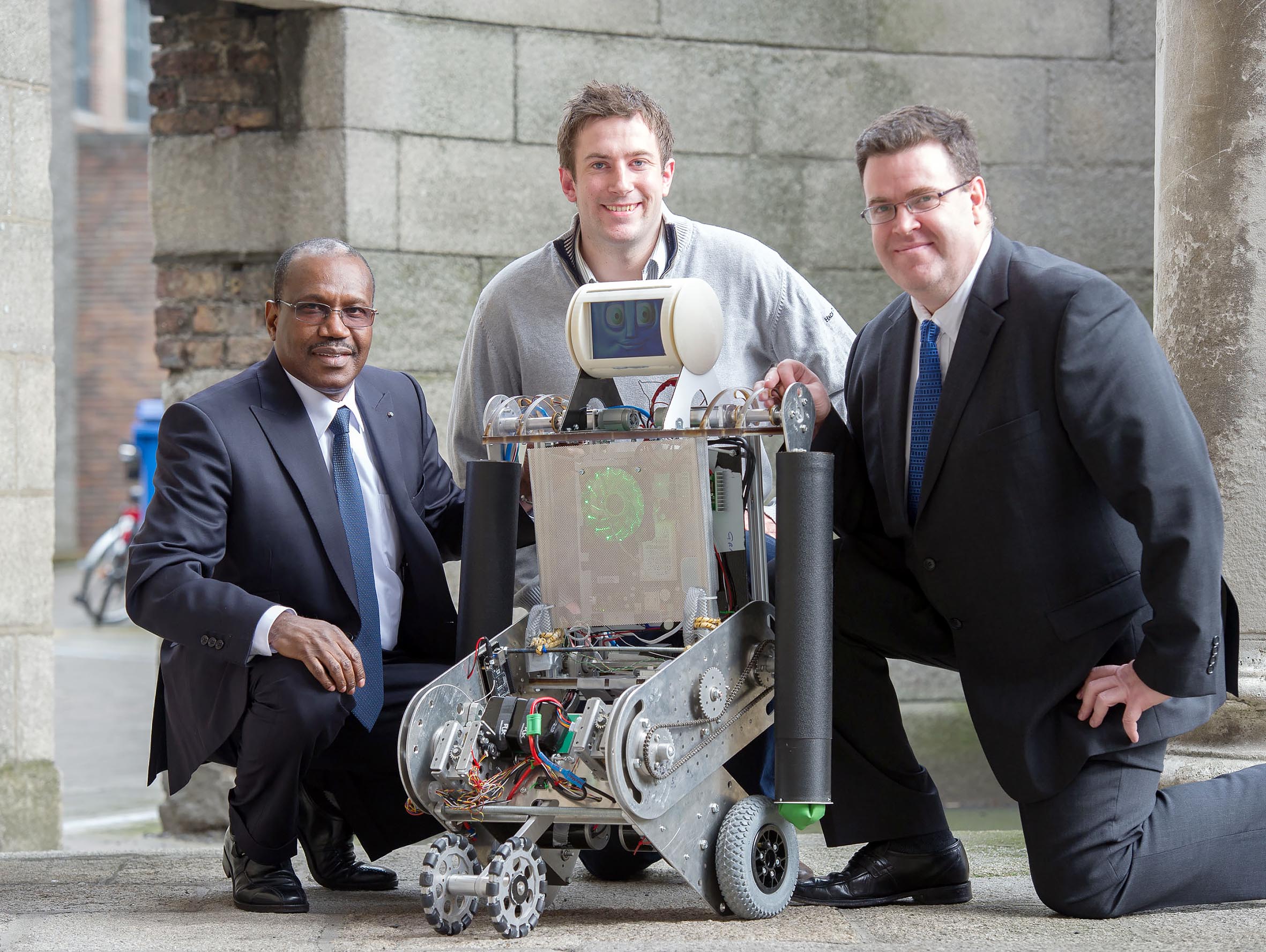
When Robbie is in its default kneeling position it can interact easily with Joanne as her head is approximately the same height as the robot's head. This position also allows the robot to bend at the waist to pick up things without falling over. The robot can rise into a standing position where it is about the height and width of a 10-year-old child. Small objects like phones or pencils can be picked up with an extensible arm, on the end of which is a 'hand' (a balloon filled with ground coffee - an idea borrowed from researchers in Cornell University). The balloon can be inflated or deflated and this allows it to conform to and grip a wide range of object shapes, sizes and types. Speaking about the challenges with and capabilities of the robot, Assistant Professor Kelly added: "I knew this was a hugely ambitious project, given the timescale and funding constraints, but I was confident that with the calibre of people we have here in Trinity and the goodwill they show, that we could demonstrate something of real potential for Joanne and other people who may have similar needs. The prototype is just the first step on the journey, but we've designed it in a manner that will allow us to develop and extend the capability in any future generations of 'Robbie'. There is still a lot of work that needs to be done with regard to making the design more elegant and the functionality more extensive before the robot would be ready for use outside of our test environment. However, even to get as far as we've done in this time is a tribute to the energy and ability of the team. It has been immensely hard work but sometimes you just have to do the right thing, and ultimately the reward is the satisfaction of seeing something like we have today." The robot made a brief appearance at the premiere in October, but received its official public unveiling in March 2014, when ITU secretary general Dr. Hamadoun Toure (who was behind the funding for this project) came to Dublin and visited the team in Trinity College. Describing the team as 'simply phenomenal', Dr. Toure talked of how proud he was that ITU was associated with the project. Since the visit, further funding of Euro50,000 has been received from the President of Rwanda and Prof. Kelly and his team are busy planning the next stages in this exciting and ambitious project.