

Lightweight andromorphic gripper for service robot applications
Grasping and manipulation form very important functions of personal service robots (PSRs). This research investigated the design of a lightweight under actuated gripper, this overcoming issues of high mass and complexity normally associated with grippers of this type. Some of major design requirements included:
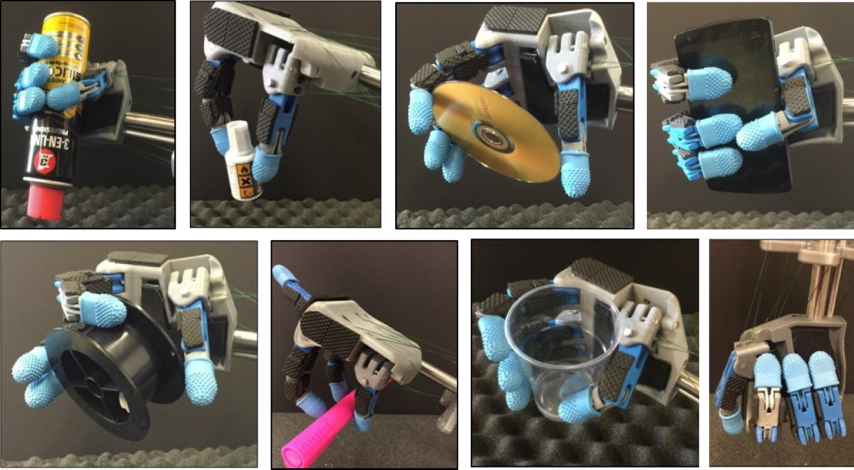
- Capable of achieving both precision and power grips (majority of objects to be grasped require one of these holds)
- Anthropomorphic design (facilitates utilisation of anthropometric data for grasp comparison, promotes increased social acceptance, enables hand to be used for gestures)
- Capable of high adaptability.
- Fingers should be compliant and easily backdrivable.
The design consists of three fingers and a thumb. The thumb was designed to be opposable such that the hand can achieve a greater number of grasps. Like previous designs from the group, the hand was designed using lightweight 3D printed parts. The system is cable driven and restoring force in the fingers is provided by springs. To provide increased compliance, and to ensure greater adaptability, springs were implemented in series with the actuator controlling the joint. This meant that when the tension in the cable grew (i.e. when the finger could no longer move), the excess tension was absorbed by the spring elongation. Using this method, the system was capable of securely grasping objects that were as heavy as 650g.
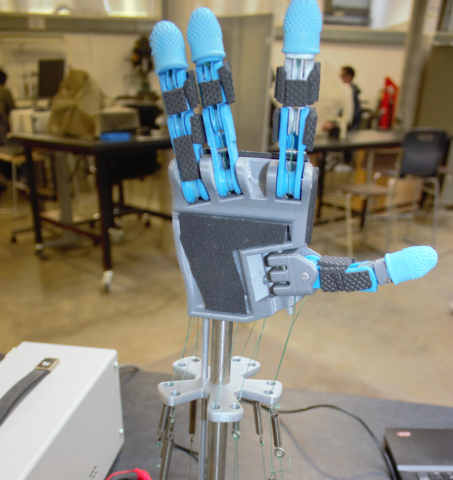
The PSR Hand
The PSR Hand II was purposefully designed to be able to achieve both power and precision grasps. Using just five actuators, it was possible to achieve 19 distinct grasp variations. This enabled it to pick-up and manipulate a wide variety of household objects.
The PSR Hand